ECCV'24 开源 | 6DGS 又快又好,无需迭代的 单图像6D物体位姿估计
作者: 深蓝学院
作者简介: 获取相关资料+SLYYDS24;人工智能领域16大方向,包含具身智能、大模型,端到端,自动驾驶......这些都有!
描述:
推荐视频
全球首个开源自动驾驶场景3DGS工作—S Gaussian:用于自动驾驶的自监督街道高斯,无需标注,就可实现逼真的街景重建
上传者: 深蓝学院
告别3DGS算法,开源SUNDAE,实现内存效率与图像质量的双赢
上传者: 深蓝学院
ECCV'24 最新Oral已开源 ! | 用于 3D大场景生成的金字塔扩散模型,实现无限场景生成与高效数据迁移
上传者: 深蓝学院
动态环境中的3DGS SLAM有效处理动态环境,减少了对语义 先验的依赖,定位精度提高97.9%
上传者: 深蓝学院
3DGS官方团队新作!减少3DGS内存占用,可达29.87倍压缩,渲染速度提高1.7倍!
上传者: 深蓝学院
GaussianPro:具有渐进传播的3D高斯泼溅,该方法在Waymo数据集上明显超越了3DGS
上传者: 深蓝学院
无需姿态的稀疏视角三维重建超过Dust3r,实现高保真3D建模和即时相机姿态估计
上传者: 深蓝学院
哈工大 | LiV-GS:用于室外环境的3DGS LiDAR-视觉集成SLAM系统
上传者: 深蓝学院
NeurlPS'24 开源 | DC-Gaussian,基于3DGS的行车记录仪视频场景重建,有效去除反射遮挡
上传者: 深蓝学院
两篇与3DGS有关的综述奉上,<3DGS:调查、技术、挑战和机遇>主:<高斯分层:3D 重建与新新型视图合成>
上传者: 深蓝学院
采用细粒度平铺的高斯并行渲染完美地解决了负载不均衡问题,加速近八倍!
上传者: 深蓝学院
用于自动驾驶视觉预训练的万能 3D高斯表示,与UniPAD相比其速度 提高了40.6% ,而GPU内存仅为70%
上传者: 深蓝学院
ETH最新!CVPR | 2024NeLF-Pro:用于多尺度新视图合成的神经光场探针,一个方法解决多种规模场景的快速渲染重建
上传者: 深蓝学院
MAVIS:使用基于SE2(3)的精确IMU预积分的多摄像头增强视觉惯性SLAM,该研究成果已被icra2024接受。
上传者: 深蓝学院
ICRA 2024|Lightning NeRF:速度提升10倍!为自动驾驶场景而生
上传者: 深蓝学院
首个关于NeRF与3DGS如何重塑SLAM的最新综述,旨在为初学者和资深专家提供重要的指南
上传者: 深蓝学院
ECCV'24 | FPV-NeRF,Meta的新视图合成方法,为无人机空间感知带来革命性提升
上传者: 深蓝学院
3D Gaussian Splatting在自动驾驶中的应用——建模动态城市场景
上传者: 深蓝学院
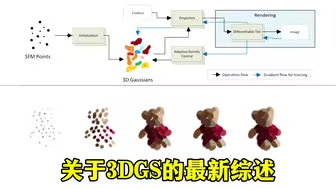
关于3DGS的最新综述,3D重建与新型视图合成
上传者: 深蓝学院
最新开源MVSGaussian:基于多视角 立体图像的快速通用高斯溅射重建 训练提速13倍,渲染300+FPS
上传者: 深蓝学院
异构机器人无GPS协作!宾大重磅推出SlideSLAM:实时去中心化的度量语义SLAM
上传者: 深蓝学院
CVPR 2024 Highlight【清华、哈佛】|LangSplat:3D语言高斯溅射,告别模糊语言场,精准定义3D空间对象边界
上传者: 深蓝学院
超越所有SOTA!3DGS结合NeRF到4DGF 重塑动态城市场景新视图合成
上传者: 深蓝学院
ECCV 2024 代码开源 | HTCL:分层时间上下文,超过LiDAR,问鼎OCC,霸榜所有视觉方案
上传者: 深蓝学院
ICRA | 2024:牛津大学针对NeRF和激光雷达的缺点,提出了NeRF融合激光雷达SLAM的大场景重建系统
上传者: 深蓝学院
CVPR'24 | 4K分辨率实时4D 视图合成,好于eNeRF30倍并达到了最先进的渲染质量
上传者: 深蓝学院
机器人顶级期刊RA-L2023年 Best Paper "H2 Mapping:使用 分层混合表示的实时密集建图"
上传者: 深蓝学院
与CityDreamer相比速度提高60倍!GaussianCity:重建你的无人机视图与自动驾驶场景【可在主页预约四场与”3DGS ”相关的公开直播课
上传者: 深蓝学院
国内智驾老兵百度开源BEVWorld:通过统一BEV潜在空间实现自动驾驶的多模态世界模型
上传者: 深蓝学院
NeurIPS 24' 开源 | 面向空间智能的新视觉任务:基于RGB图像的多视角场景图拓扑表示构建
上传者: 深蓝学院
5秒产出高质量3D物体的大型多视角高斯模型LGM,代码和模型权重均已开源,研究者还提供了一个在线 Demo 供大家试玩
上传者: 深蓝学院
我国高校今年发表的五篇关于无人机的创新性研究成果,每篇都是被顶刊录入的存在!
上传者: 深蓝学院
CVPR 2024 | VastGaussian:首个基于3D GS的大场景高质量重建和实时渲染方法,出自清华大学、华为诺亚方舟实验室、中国科学院
上传者: 深蓝学院
DELTA:适用于任何视频的密集 高效长距离3D跟踪,单次可捕获 “10万条3D轨迹”,提速8倍+
上传者: 深蓝学院
当机器人遇到遮挡:IROS'24最新佳作揭秘「如何在视觉盲区保持精准人体追踪
上传者: 深蓝学院
CVPR 2024 | 如何给NeRF开透视眼?结合医疗领域的"它"就够了
上传者: 深蓝学院
ECCV'24 | "突破传统",通过直接BEV特征注意力加速在线建图和行为预测
上传者: 深蓝学院
腾讯XR实验室 | Sketch2Scene:”神笔马良”,你随意画的草图就可自动生成交互式3D游戏场景,且效果紧密契合你的意图
上传者: 深蓝学院
视觉SLAMVIO开源代码解析-DSO
上传者: 深蓝学院
Science Robotics | 无需外部传感器,通过关节力矩传感技术即可实现"触摸即命令"
上传者: 深蓝学院