SLAM天花板!定位迪士尼最速过山车,只需一个OAK相机
作者: brainyuan
作者简介: odrive_ros2_control作者,RTAB-Map第二大贡献者,姑苏领军,个人咨询免费
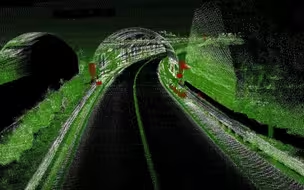
描述: 去年12月,我们发布了世界首套过山车SLAM数据集。如今过去了一年,似乎还没有人能在这套数据集上跑通其它SLAM算法。那么只好由我们自己来继续探索SLAM的极限。为了验证我们这一年来的技术改进,我又来乘坐迪士尼有史以来最快的过山车——创极速光轮,录制了新的数据。 过山车场景包含了强震动、剧烈机动、黑暗、光照突变、视觉欺骗、长走廊等几乎所有挑战性的元素,且运行轨迹可以复现,因此是检验SLAM的极佳平台。 我们仍然坚持纯视觉惯导方案,只使用一个OAK相机,没有激光雷达(毕竟迪士尼也不会允许你带那玩意儿进去)。使用我们最新版的Factor-VIO仍然可以轻松应对这种极端场景,而且与去年的结果相比,累积误差更小(因为上下车站台不同,仍然无法使用回环检测)。 我们也坚持使用同一套算法和配置来应对所有环境,对于这一场景,我们也没有进行任何专门的优化定制。也就是说,这次使用的Factor-VIO和我们Factor Perception SDK中的是完全一样的。希望大家在使用我们的产品时也可以更放心。 采用新工艺的广视角OAK相机也即将到货。对空间感知和SLAM有需要的朋友欢迎私信咨询。我们的官方网站也将在今年底上线。届时大家可直接从我们官方下载SDK安装包及文档,我们也将逐步更新一系列技术白皮书来阐述我们对空间感知和SLAM的独特理解。

![大三毕设:无需GPU,实时,且高精度的动态SLAM [开源]](/image/abc2fabddf7d0787717e71fee6661fea5468ec27.jpg@336w_190h_!web-video-rcmd-cover.avif)





































