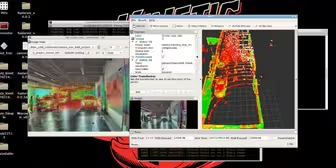
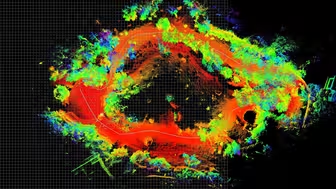
rk3588-ros2-humble和mid360激光雷达+fast-lio2算法实现机器人无人车户外小公园slam建图
作者: 视觉动力机器人
作者简介: 机器人与人工智能,号:视觉动力机器人,人工智障研究生
描述: 低成本方案实现户外3d 定位和建图,基于rk3588 ROS2 humble 实现fast lio2 SLAM建图算法

作者: 视觉动力机器人
作者简介: 机器人与人工智能,号:视觉动力机器人,人工智障研究生
描述: 低成本方案实现户外3d 定位和建图,基于rk3588 ROS2 humble 实现fast lio2 SLAM建图算法


![[ROS2] FAST-LIVO2 复现 Jetson + Mid 360 + D435i](/image/968b3988ca88e64de5a0deca249eec96dc1b29a9.jpg@336w_190h_!web-video-rcmd-cover.avif)