“十六条腿走路的乐高很难找?”
作者: BEC乐高实验
作者简介: Brick Experiment Channel 官方账号,欢迎关注~~~商务加V:270003641(注明来意)
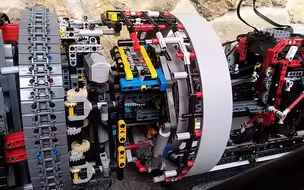
描述: 00:00 简单的双腿行走机器人(无转向功能) 01:18 双腿行走机器人(双腿+行走底座,尾部腿用于转向) 02:41 四腿行走机器人 04:42 八腿行走机器人(Klann连杆机构) 06:44 十六腿行走机器人 08:32 乐高游行 ------------- 什么是Klann连杆机构? Klann连杆机构是一种机械装置,用来让机器人像动物一样走路。它是美国人Joe Klann在1994年发明的,常用在机器人或乐高模型上。 它怎么工作? 结构:它由几根连杆(像小棒)和铰链(可以转动的连接点)组成。 运动:一根连杆转动时,带动其他连杆,让“腿”像走路一样动起来:先抬腿、向前迈、再放下。 效果:看起来像蜘蛛或昆虫走路,腿的动作很平稳。 有什么用? 机器人:让机器人能在不平的地上走,比如沙地或石头地。 教育:用在乐高或课堂上,教大家机械怎么动。 研究:模仿动物的走路方式,设计更像生物的机器人。 视频中的例子 视频里“04:42 八腿行走机器人(Klann连杆机构)”就是用这个机构做的。八条腿一起动,像蜘蛛一样走路,很稳定。 优点和缺点 优点:能在不平地上走,动作像真动物。 缺点:走得慢,零件多,做起来有点复杂。 总结 Klann连杆机构就是用连杆让机器人像动物一样走路的装置,适合在不平地上用,常出现在机器人或乐高模型里。