【Open3D】三维点云python教程
作者: 反方向的钟Go
作者简介:
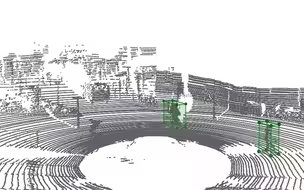
描述: YouTube 在这个计算机视觉和Open3D视频中,我们将看看如何使用ICP对点云进行姿势估计。首先,我们将讨论迭代最接近点算法,以及它背后的想法是什么。然后,我们将跳入代码,并查看一些示例,说明如何在点云上进行姿势估计,应用转换并对齐两个点云。

作者: 反方向的钟Go
作者简介:
描述: YouTube 在这个计算机视觉和Open3D视频中,我们将看看如何使用ICP对点云进行姿势估计。首先,我们将讨论迭代最接近点算法,以及它背后的想法是什么。然后,我们将跳入代码,并查看一些示例,说明如何在点云上进行姿势估计,应用转换并对齐两个点云。




























![[5分钟点云学习] #01 最远点采样 FPS](/image/a6653d6ca3539939372449f8d67c4cdf48e58af6.jpg@336w_190h_!web-video-rcmd-cover.avif)

![[5分钟点云学习] #03 PointNet++ 竟然是图结构?!](/image/2f9ae7112ea6ce742bdde0aa8c2dfcc41c05145e.jpg@336w_190h_!web-video-rcmd-cover.avif)






