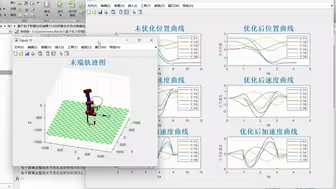
六关节自由机械臂轨迹规划(RRT)、加速度曲线、关节速度仿真
作者: 北城向北
作者简介: 工作繁忙,有时不能及时回复请见谅!评论区置顶工房链接可以付款获取学习资料,如果下单后有疑问可以与我沟通,bauae857
描述: 六关节自由机械臂轨迹规划(RRT)、加速度曲线、关节速度仿真 1、描述:将RRT路径轨迹规划算法与机械臂进行结合,且机械臂为六自由度机械臂 2、程序中障碍物,起始点坐标均可修改 3、包括:六关节曲线、关节速度曲线、加速度曲线、程序附带详细中文注释,快速学习RRT+机械臂,事半功倍




















![[Pybullet] SAC强化学习训练机械臂抓取物体](/image/afe4ac4c1f0012d6767502daee2705bacdba6c4a.jpg@336w_190h_!web-video-rcmd-cover.avif)


















